
chingshuai
commited on
Commit
·
ddc89a5
1
Parent(s):
d9ffb99
增加资源文件
Browse files- assets/arch.png +3 -0
- assets/banner.png +3 -0
- assets/config_simplified.yml +37 -0
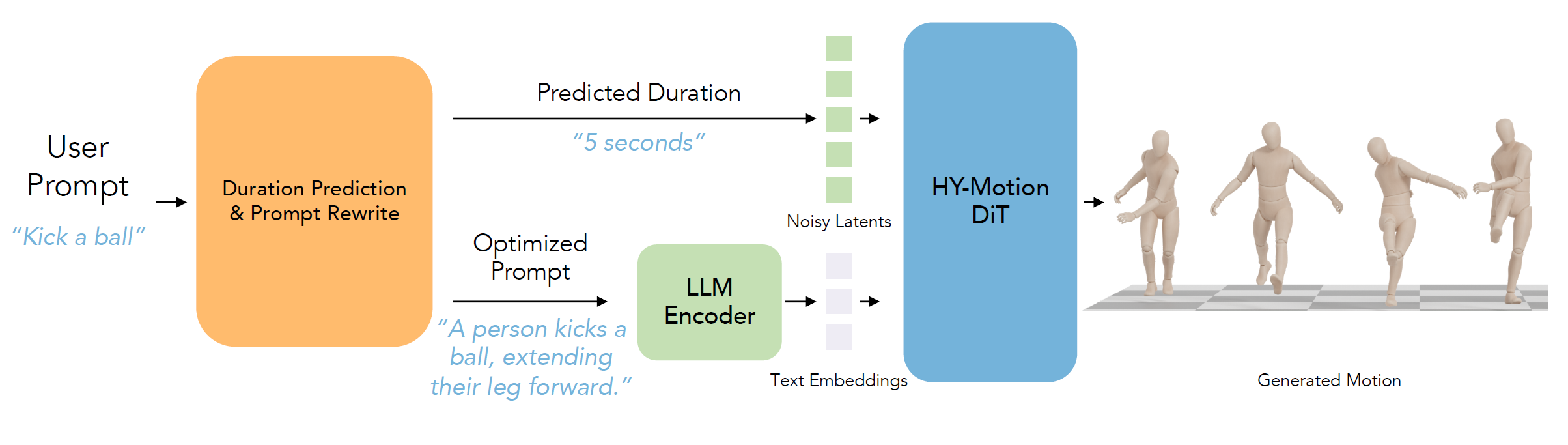
- assets/pipeline.png +3 -0
- assets/sotacomp.png +3 -0
- assets/teaser.png +3 -0
- assets/wooden_models/boy_Rigging_smplx_tex.fbx +3 -0
- hymotion/pipeline/motion_diffusion.py +8 -42
assets/arch.png
ADDED

|
Git LFS Details
|
assets/banner.png
ADDED
|
Git LFS Details
|
assets/config_simplified.yml
ADDED
|
@@ -0,0 +1,37 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
network_module: hymotion/network/hymotion_mmdit.HunyuanMotionMMDiT
|
| 2 |
+
network_module_args:
|
| 3 |
+
apply_rope_to_single_branch: false
|
| 4 |
+
ctxt_input_dim: 4096
|
| 5 |
+
dropout: 0.0
|
| 6 |
+
feat_dim: 1024
|
| 7 |
+
input_dim: 201
|
| 8 |
+
mask_mode: narrowband
|
| 9 |
+
mlp_ratio: 4.0
|
| 10 |
+
num_heads: 16
|
| 11 |
+
num_layers: 18
|
| 12 |
+
time_factor: 1000.0
|
| 13 |
+
vtxt_input_dim: 768
|
| 14 |
+
train_pipeline: hymotion/pipeline/motion_diffusion.MotionFlowMatching
|
| 15 |
+
train_pipeline_args:
|
| 16 |
+
enable_ctxt_null_feat: true
|
| 17 |
+
enable_special_game_feat: true
|
| 18 |
+
infer_noise_scheduler_cfg:
|
| 19 |
+
validation_steps: 50
|
| 20 |
+
losses_cfg:
|
| 21 |
+
recons:
|
| 22 |
+
name: SmoothL1Loss
|
| 23 |
+
weight: 1.0
|
| 24 |
+
noise_scheduler_cfg:
|
| 25 |
+
method: euler
|
| 26 |
+
output_mesh_fps: 30
|
| 27 |
+
random_generator_on_gpu: true
|
| 28 |
+
test_cfg:
|
| 29 |
+
mean_std_dir: ./stats/
|
| 30 |
+
text_guidance_scale: 5.0
|
| 31 |
+
text_encoder_cfg:
|
| 32 |
+
llm_type: qwen3
|
| 33 |
+
max_length_llm: 128
|
| 34 |
+
text_encoder_module: hymotion/network/text_encoders/text_encoder.HYTextModel
|
| 35 |
+
train_cfg:
|
| 36 |
+
cond_mask_prob: 0.1
|
| 37 |
+
train_frames: 360
|
assets/pipeline.png
ADDED
|
Git LFS Details
|
assets/sotacomp.png
ADDED

|
Git LFS Details
|
assets/teaser.png
ADDED

|
Git LFS Details
|
assets/wooden_models/boy_Rigging_smplx_tex.fbx
ADDED
|
@@ -0,0 +1,3 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
version https://git-lfs.github.com/spec/v1
|
| 2 |
+
oid sha256:4e1a4fc5b121d5fa61a631ee22ba360ca128279d794d1ed75b2acb9486e71cc8
|
| 3 |
+
size 16490768
|
hymotion/pipeline/motion_diffusion.py
CHANGED
|
@@ -36,7 +36,6 @@ def length_to_mask(lengths: Tensor, max_len: int) -> Tensor:
|
|
| 36 |
|
| 37 |
|
| 38 |
def start_end_frame_to_mask(start_frame: Tensor, end_frame: Tensor, max_len: int) -> Tensor:
|
| 39 |
-
# 生成一个 (B, max_len) 的mask,只有在[start_frame, end_frame]区间内为True,其余为False
|
| 40 |
assert (start_frame >= 0).all() and (end_frame >= 0).all(), f"start_frame={start_frame}, end_frame={end_frame}"
|
| 41 |
lengths = end_frame - start_frame + 1
|
| 42 |
assert lengths.max() <= max_len, f"lengths.max()={lengths.max()} > max_len={max_len}"
|
|
@@ -184,6 +183,7 @@ class MotionGeneration(torch.nn.Module):
|
|
| 184 |
if not allow_empty_ckpt:
|
| 185 |
if not os.path.exists(ckpt_name):
|
| 186 |
import warnings
|
|
|
|
| 187 |
warnings.warn(f"Checkpoint {ckpt_name} not found, skipping model loading")
|
| 188 |
else:
|
| 189 |
checkpoint = torch.load(ckpt_name, map_location="cpu", weights_only=False)
|
|
@@ -222,30 +222,6 @@ class MotionGeneration(torch.nn.Module):
|
|
| 222 |
should_apply_smooothing=should_apply_smooothing,
|
| 223 |
)
|
| 224 |
|
| 225 |
-
def _forward_smpl_batch(
|
| 226 |
-
self,
|
| 227 |
-
root_rot6d: Tensor, # (B, L, 1, 6)
|
| 228 |
-
body_rot6d: Tensor, # (B, L, 21, 6)
|
| 229 |
-
transl: Tensor, # (B, L, 3)
|
| 230 |
-
left_hand_pose: Optional[Tensor] = None, # (B, L, 15, 6)
|
| 231 |
-
right_hand_pose: Optional[Tensor] = None, # (B, L, 16, 6)
|
| 232 |
-
) -> Tensor:
|
| 233 |
-
device = transl.device
|
| 234 |
-
bsz, L = transl.shape[:2]
|
| 235 |
-
k3d_all = []
|
| 236 |
-
tmp_betas = torch.zeros(1, 16, device=device)
|
| 237 |
-
for bs in range(bsz):
|
| 238 |
-
out = self.body_model(
|
| 239 |
-
body_rot6d[bs],
|
| 240 |
-
tmp_betas,
|
| 241 |
-
root_rot6d[bs],
|
| 242 |
-
transl[bs],
|
| 243 |
-
left_hand_pose=(left_hand_pose[bs] if left_hand_pose is not None else None),
|
| 244 |
-
right_hand_pose=(right_hand_pose[bs] if right_hand_pose is not None else None),
|
| 245 |
-
)
|
| 246 |
-
k3d_all.append(out.detach().cpu())
|
| 247 |
-
return torch.stack(k3d_all, dim=0) # (B, L, J, 3)
|
| 248 |
-
|
| 249 |
def _decode_o6dp(
|
| 250 |
self,
|
| 251 |
latent_denorm: torch.Tensor,
|
|
@@ -299,32 +275,22 @@ class MotionGeneration(torch.nn.Module):
|
|
| 299 |
transl_smooth = transl_fixed
|
| 300 |
|
| 301 |
if self.body_model is not None:
|
| 302 |
-
print(
|
|
|
|
|
|
|
| 303 |
with torch.no_grad():
|
| 304 |
vertices_all = []
|
| 305 |
k3d_all = []
|
| 306 |
for bs in range(rot6d_smooth.shape[0]):
|
| 307 |
-
out = self.body_model.forward(
|
| 308 |
-
{
|
| 309 |
-
'rot6d': rot6d_smooth[bs],
|
| 310 |
-
'trans': transl_smooth[bs],
|
| 311 |
-
}
|
| 312 |
-
)
|
| 313 |
vertices_all.append(out["vertices"])
|
| 314 |
-
k3d_all.append(out[
|
| 315 |
vertices = torch.stack(vertices_all, dim=0)
|
| 316 |
k3d = torch.stack(k3d_all, dim=0)
|
| 317 |
-
print(f
|
| 318 |
-
# k3d = self._forward_smpl_batch(
|
| 319 |
-
# rot6d_smooth[:, :, 0:1, :].to(device),
|
| 320 |
-
# rot6d_smooth[:, :, 1:22, :].to(device),
|
| 321 |
-
# transl_smooth,
|
| 322 |
-
# left_hand_pose=(rot6d_smooth[:, :, 22:37, :].to(device) if left_hand_pose is not None else None),
|
| 323 |
-
# right_hand_pose=(rot6d_smooth[:, :, 37:52, :].to(device) if right_hand_pose is not None else None),
|
| 324 |
-
# )
|
| 325 |
# align with the ground
|
| 326 |
min_y = vertices[..., 1].amin(dim=(1, 2), keepdim=True) # (B, 1, 1)
|
| 327 |
-
print(f
|
| 328 |
k3d = k3d.clone()
|
| 329 |
k3d[..., 1] -= min_y # (B, L, J) - (B, 1, 1)
|
| 330 |
transl_smooth = transl_smooth.clone()
|
|
|
|
| 36 |
|
| 37 |
|
| 38 |
def start_end_frame_to_mask(start_frame: Tensor, end_frame: Tensor, max_len: int) -> Tensor:
|
|
|
|
| 39 |
assert (start_frame >= 0).all() and (end_frame >= 0).all(), f"start_frame={start_frame}, end_frame={end_frame}"
|
| 40 |
lengths = end_frame - start_frame + 1
|
| 41 |
assert lengths.max() <= max_len, f"lengths.max()={lengths.max()} > max_len={max_len}"
|
|
|
|
| 183 |
if not allow_empty_ckpt:
|
| 184 |
if not os.path.exists(ckpt_name):
|
| 185 |
import warnings
|
| 186 |
+
|
| 187 |
warnings.warn(f"Checkpoint {ckpt_name} not found, skipping model loading")
|
| 188 |
else:
|
| 189 |
checkpoint = torch.load(ckpt_name, map_location="cpu", weights_only=False)
|
|
|
|
| 222 |
should_apply_smooothing=should_apply_smooothing,
|
| 223 |
)
|
| 224 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 225 |
def _decode_o6dp(
|
| 226 |
self,
|
| 227 |
latent_denorm: torch.Tensor,
|
|
|
|
| 275 |
transl_smooth = transl_fixed
|
| 276 |
|
| 277 |
if self.body_model is not None:
|
| 278 |
+
print(
|
| 279 |
+
f"{self.__class__.__name__} rot6d_smooth shape: {rot6d_smooth.shape}, transl_smooth shape: {transl_smooth.shape}"
|
| 280 |
+
)
|
| 281 |
with torch.no_grad():
|
| 282 |
vertices_all = []
|
| 283 |
k3d_all = []
|
| 284 |
for bs in range(rot6d_smooth.shape[0]):
|
| 285 |
+
out = self.body_model.forward({"rot6d": rot6d_smooth[bs], "trans": transl_smooth[bs]})
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 286 |
vertices_all.append(out["vertices"])
|
| 287 |
+
k3d_all.append(out["keypoints3d"])
|
| 288 |
vertices = torch.stack(vertices_all, dim=0)
|
| 289 |
k3d = torch.stack(k3d_all, dim=0)
|
| 290 |
+
print(f"{self.__class__.__name__} vertices shape: {vertices.shape}, k3d shape: {k3d.shape}")
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 291 |
# align with the ground
|
| 292 |
min_y = vertices[..., 1].amin(dim=(1, 2), keepdim=True) # (B, 1, 1)
|
| 293 |
+
print(f"{self.__class__.__name__} min_y: {min_y}")
|
| 294 |
k3d = k3d.clone()
|
| 295 |
k3d[..., 1] -= min_y # (B, L, J) - (B, 1, 1)
|
| 296 |
transl_smooth = transl_smooth.clone()
|